Trunked system misbehaving? Here's another possible cause, maybe

The coverage area of any radio site is determined by a number of factors. Technical folk and system owners mistakenly take the outbound coverage (that is the repeater/base to radio signal path) as the extent of the system's coverage. However, the radio system coverage is determined by both the inbound (radio to repeater) and outbound path.
In layman's' terms: what's the point of having a signal when you can't talk back?
The temptation, in some countries, is to operate the repeater(s) at full power - or beyond the TX power for which the system was licensed.
This sort of works in conventional systems, where it's only necessary for radio users to hear commands and, in most cases, not respond to them (think APB). This concept also worked well in paging where there was one-way communications to receivers (pagers) with a poor antenna and worn on the belt.
In a trunked system such as Capacity Max, the radios are reliant on coverage in both directions (i.e. inbound and outbound) since a radio will use the control channel to measure the signal strength and will register - if it (the radio) can be heard by the repeater.
This means that the TX RF power on repeater sites need to be set, such that the inbound and outbound RSSI are the same at the edge of the inbound coverage area.
In layman's' terms: the outbound signal should only get you as far as the inbound signal.
A similar principle is applied in GSM; TETRA and LTE. These systems are set up so that a terminal/device will not attempt to register/affiliate on a site, if the site cannot hear it. In fact these technologies employ additional methods to ensure the link is reliable.
Since a radio on a Capacity Max system, will only have the control channel RSSI (signal strength) and BER (bit error rate) to determine site suitability, we need to ensure the following doesn't happen:
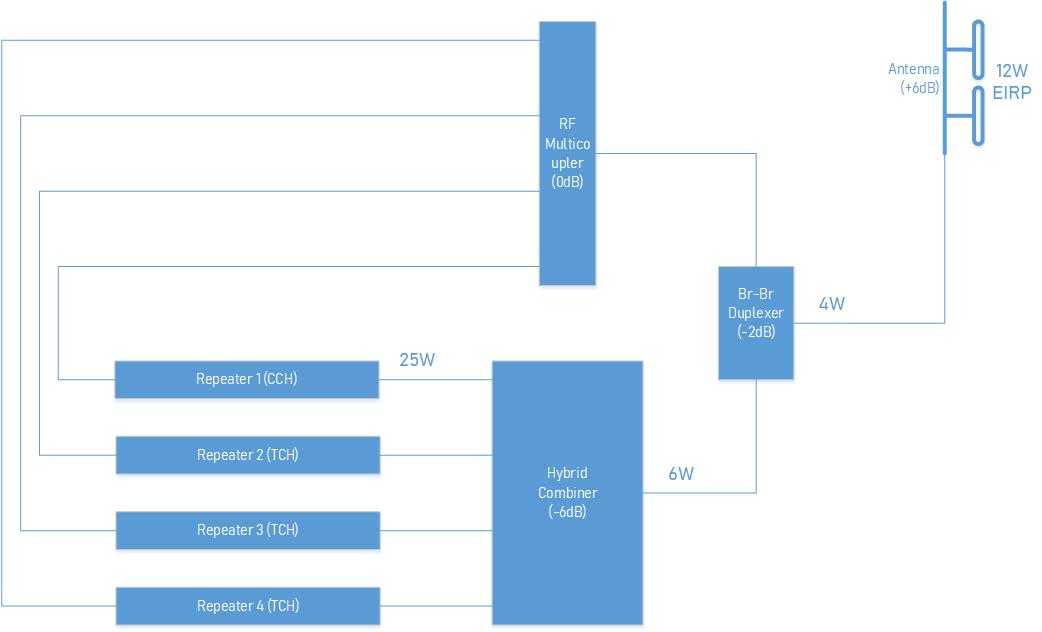
The control channel on s site is set to 25W. The insertion loss of the RF filtering hardware and cables is 9dB. The antenna gain is 6dBd. The ERP will therefore be ~12W.
If this is a UHF system, the free space path loss will be around 113dB. This means that there will be around 54µV (or -72,3dBm) at the receiver of a portable radio 25km away - under really ideal conditions.
Now assuming the antenna gain on the portable is zero, the ERP will be around 4W at high power.
Since the free space path loss will be the same both ways, the signal strength at the high site antenna will be around 0,14µV (or -124dBm) and with the insertion losses, the signal at the repeater antenna socket will be 0,1µV (or -127dBm).
There is a good chance that the repeater will not hear the registration attempt from the radio, even though the received signal, at the radio is just fine.
A similar situation will occur when the radio roams to; or registers on the site, while it is within the inbound coverage area (shaded green below). The radio will remain on this site even when it moves into the area where there is no inbound coverage - but the outbound signal from the site is good (shaded yellow below).

So how do you solve this?
There are a number of ways to solve this but one of the easiest methods is to use an analysis tool that uses radio information that already may be there.
If you are using location tracking or have GPS capable radios, you can gather some additional information from a MOTOTRBO system that will plot the signal strength and location on a map.
Whenever a radio sends it's location, the tool will capture this information and store it for a certain amount of time. Then when that user speaks, the signal strength at the repeater is measured and stored together with the last known location of that radio.
The same (or a similar) tool can be used to measure the outbound signal strength. This however, requires a user to make a drive test with a radio and laptop. Some tools have the ability to remotely poll the radio, allowing the signal strength to be measured.
All of this data is placed into a map allowing you to analyse and determine whether the repeater TX power needs to be adjusted.
The above process may need to be repeated a few times to get optimal performance. It may also be necessary to repeat the test under different conditions (e.g. high RF noise or extreme weather).
Here is a list of tools that can do the above measurements:
If I missed something from this list, please let me know.
Also see my previous post on this topic.




Leave a Comment